用KK多轴飞控给直升机增稳
标签:直升机 航模 无人机
飞鱼BH1JSS 发布于 2015-03-06 12:21
最近多轴飞行器很火,拜电子技术的进步,多轴飞行器最难的控制问题被PCB和各种传感器轻松解决,各种飞控系统百花齐放,从最简单的三轴陀螺——KK飞控,到MWC、APM、Pixhawk等带平衡仪、气压计、地磁计……各种高级功能的飞控,价格都越来越便宜,让大家有了更多的选择,也让航模有了更多的玩法。有了更高级的飞控,原来的飞控扔了多可惜?我们可以让它发挥一下余热。我这里先抛个砖:用多轴飞控的TriCopter(三轴)模式来控制120°CCPM斜盘系统的直升机模型。我使用的是KK飞控进行试验。
Step 1: 原理构思
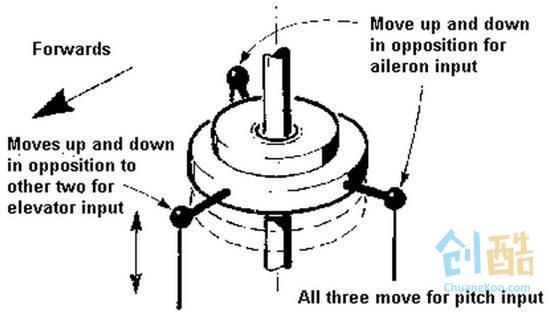

首先了解一下什么是CCPM斜盘,这部分科普了,了解的朋友可以无视。直升机是通过斜盘拉动各个桨叶,让它们周期变矩,从而达到控制整个旋翼面俯仰倾斜的,因此要让斜盘能够前后或左右倾斜,至少需要在2个轴向上能够控制,一个控制俯仰,一个控制倾斜,当然,直升机的旋翼们还需要同时变矩(可简单理解为旋翼的倾角),这就是变“总矩”,这样就需要至少3个舵机分别动作了。CCPM是Cylic Collective Pitch Mixing,它是让多个舵机同时动作来控制整个斜盘的俯仰、倾斜和变总矩。这样的好处是每个舵机的负载更小,整个斜盘的动作更快,更精准。比如常见的120的CCPM斜盘,3个舵机呈120度分布,同时上升或下降就是变总矩,前舵机上升,后两个舵机下降就是后仰;前舵机不动,后两个舵机上下差动,就会让斜盘左右倾斜。
参考文献:CCPM斜盘系统:http://www.iroquois.free-online.co.uk/ccpm.htm
因此,多轴飞控的TriCopter(三轴)模式原理上可以来控制120°CCPM斜盘系统的直升机。TriCopter三轴的基本原理是,在同一平面内的3个旋翼中,两个逆时针旋转,一个顺时针旋转,其中一个旋翼(通常是尾巴)平面可以稍稍倾斜,以克服整个系统的反扭力。而整个系统的俯仰、倾斜也是由3个旋翼输出的不平衡来控制,比如前面两个旋翼力量大,后面一个稍小,整个飞机就后仰;后面一个旋翼动力输出不变,前面两个旋翼一个增大一个减小,飞机就倾斜。三个旋翼动力同时增大或减小,控制上升或下降,这和120°三舵机CCPM系统直升机的控制方式很相似。所以,我们就动手做吧
Step 2: 记得设置遥控器
在你的遥控器上选择一个Normal斜盘模式的直升机,就是一个舵机控制总螺距的那种,一般用接收机上的AUX1通道控制总矩。
Step 3: 连接接收机与飞控
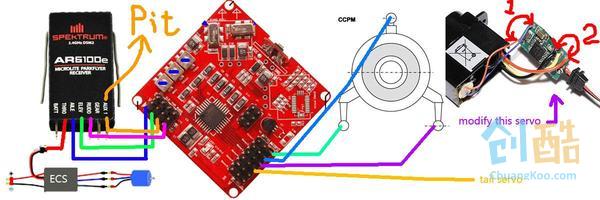
把接收机上的AUX1(螺距通道)连接多轴飞控上的油门通道,其他正常连接:副翼通道连接飞控上的副翼、升降通道连接飞控上的升降、方向通道连接飞控上的方向,但接收机的油门通道直接连接电子调速器。
Step 4: 可能需要改造舵机
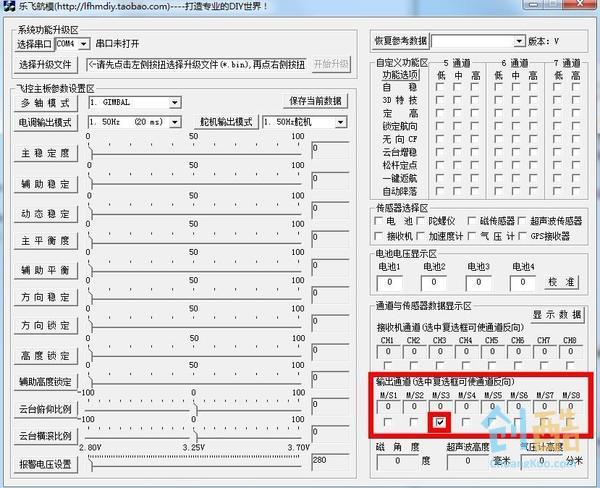
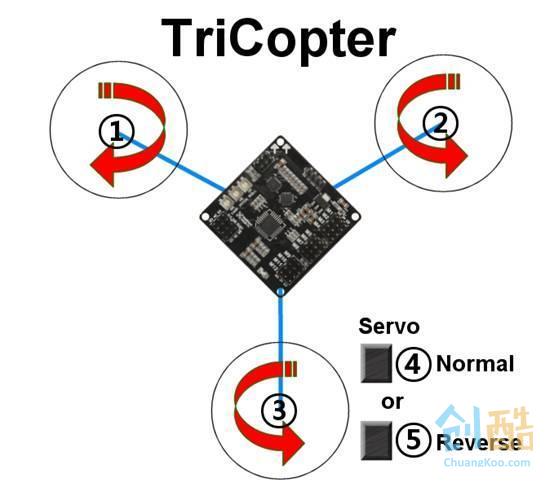
把120度CCPM直升机上的三个斜盘舵机分别连接飞控上的1、2、3电机插口,这里要根据你的CCPM舵机布局,左右舵机不要错,前后无所谓,飞控可以设置反馈方向,尾舵机连接飞控上的4号电机插口。这里还需注意,KK飞控不能设置舵机输出方向,在三轴中它输出的转向是两反一正,但是用在CCPM直升机上,同时变总矩时需要三个舵机同向,因此你需要改造一个舵机,让它变成反向舵机,改造反向舵机的方法很简单,打开舵机的后盖,把舵机里面的马达+、-线对调,再把电位器的+、-线对调,中位线不动就好了。当然,在一些高级的多轴飞控里可以设置每个通道的输出方向,只要勾选一下反向就行了,不用改动舵机。
Step 5: 反馈设置


基本完工,需要在飞控设置中校对中位(以及水平)、设置反馈方向、传感器感度等。需要注意的是,感度过高会让舵机抽疯,最好用数字舵机。另外,RUDD感度是个问题,因为多轴飞控都没有输出限幅,DUDD通道过高会有“追尾”现象(快速震动),过低又锁尾不好。我想到的方法是自己改舵机,限制输出行程,这样把感度调高点也不怕抖动了,不过这想法还没有实施。
Step 6: 试飞和调整

登录以发表评论
作者的最新作品
-
怎样在创酷网发布一篇漂亮的DIY攻略 Ver1.0
2017-01-23 01:32发布
-
把激光切割机用起来——制作一个盒子
2017-01-22 17:35发布
-
用氦气球释放并回收一个飞上“太空”的摄像机
2015-04-14 13:21发布
-
每周一作(zuō) 开车也能发微信的手机神器
2015-04-02 14:24发布
-
用开源飞控套件做一架Mini四轴飞行器
2015-03-31 15:09发布
阅读数: 14334
